Advancements in robotics have led to the development of various robotic grippers that can effectively pick up and manipulate different types of objects. However, many of these grippers are complex and expensive, making them impractical for widespread use. Researchers at Purdue University and MIT have recently introduced a simpler yet equally effective robotic gripper that aims to bridge the gap between high degree of freedom grippers and traditional grippers with limited functionalities.
The newly developed robotic gripper has 5 degrees of freedom, making it easier to control while still being capable of performing intricate in-hand manipulations. The gripper consists of two fingers attached to a gripper base, with a vision-based tactile sensor mounted at the top of one finger. This sensor provides crucial information about geometry, orientation, and grip force of the object being manipulated. Each finger is equipped with a linear actuator and a rotational servo motor, allowing for complex movements.
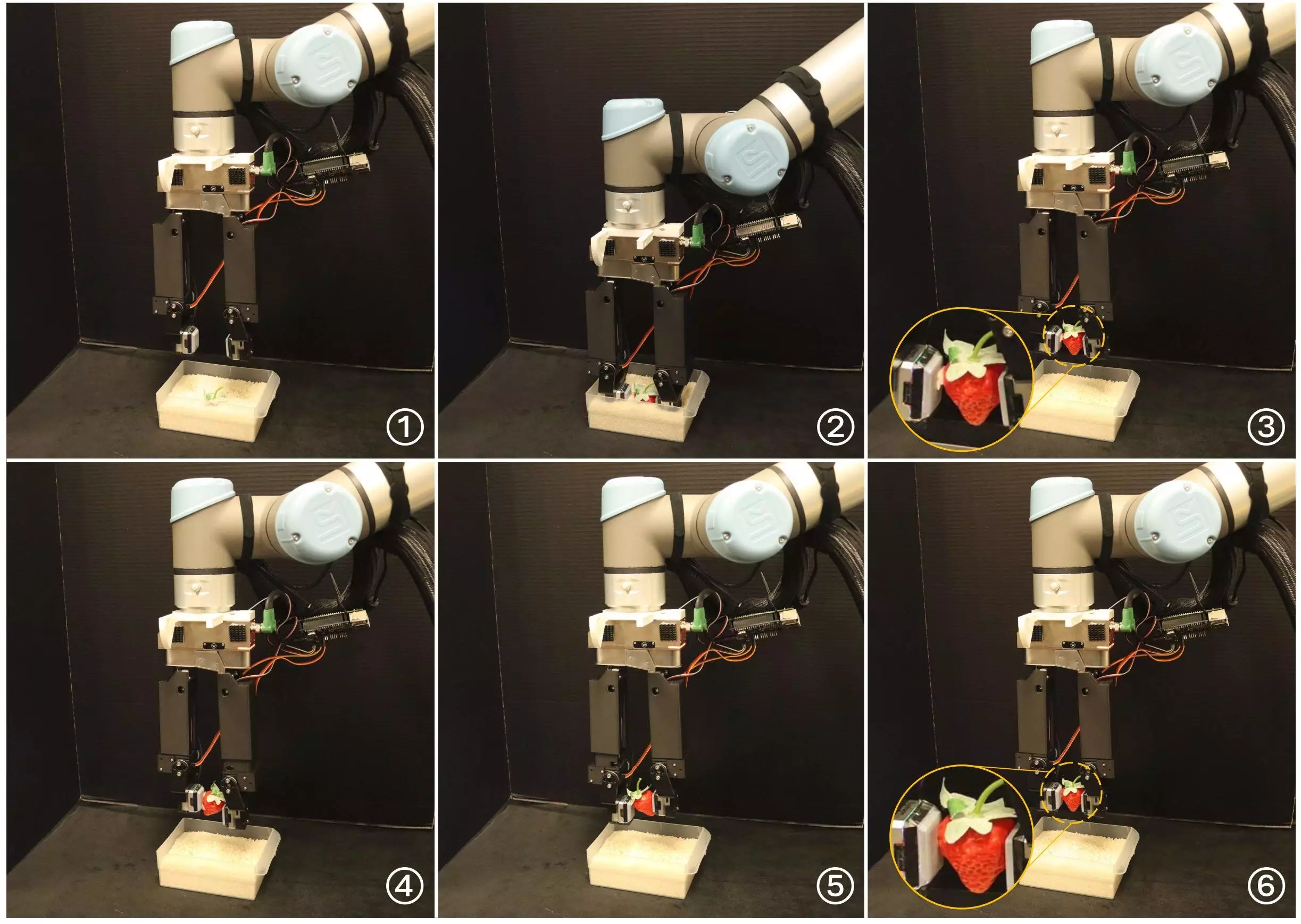
In initial real-world experiments, the researchers found that the gripper excelled in tasks such as singulation and scooping, showcasing its ability to mimic human-like motions. Despite having fewer degrees of freedom than humanoid robotic hands, the gripper was able to successfully complete intricate manipulation tasks. This simplicity in design can lead to more robust, cost-effective, and energy-efficient robotic solutions that are easier to implement and maintain.
The potential applications of this innovative robotic gripper are vast, with the possibility of being applied to a wide range of complex object manipulation tasks in various industries. The researchers plan to further develop the gripper to tackle more challenging tasks that are currently beyond the capabilities of existing gripper technologies. Furthermore, the underlying design of this gripper could inspire the development of similar robotic systems that are both efficient and affordable.
The development of a simpler yet highly effective robotic gripper by researchers at Purdue University and MIT represents a significant advancement in robotic technology. By bridging the gap between complex high degree of freedom grippers and traditional grippers, this new technology has the potential to revolutionize the field of robotics by providing cost-effective and energy-efficient solutions for object manipulation tasks. With further research and development, this gripper could pave the way for more sophisticated and versatile robotic systems in the future.
Leave a Reply