Recent advancements in the field of soft robotics have shed light on the intersection of biology and technology, particularly through the application of Turing patterns in the design of fabric-based soft pneumatic actuators (FSPAs). These novel devices, characterized by their flexible and dynamic nature, present an alternative to traditional rigid robotic components. FSPAs respond to pressure variations by deforming—either bending, stretching, or twisting—thereby enabling fluid motion that is essential for interacting safely with delicate objects and humans. Their unique properties make them invaluable in various applications including wearable technology, adaptive emergency shelters, and assistive robotics for individuals with disabilities.
Despite their promising potential, the design and manufacturing processes of FSPAs are not without challenges. Achieving the optimal balance between adaptability, effectiveness, and manufacturing efficiency has long been a trial-and-error endeavor. A recent study published in Scientific Reports, led by a team of researchers from Toyota Central Research and Development Labs and affiliated institutions, identifies innovative pathways that could simplify the creation of these soft actuators through automation and design optimization.
The research exploits Alan Turing’s morphogenesis theory, which explores how patterns are formed in nature—consider the striking stripes of a zebra or the swirling shapes in seashells. Turing proposed that these diverse configurations emerge through a reaction and diffusion process involving two substances: one instigating growth and the other inhibiting it, leading to stable, recurring patterns when combined. Drawing upon this foundational understanding, the authors of the study employed Turing patterns to develop surface textures for FSPAs.
By applying a gradient-based orientation optimization method, the researchers could intricately design the actuator’s surface membrane, therefore enhancing the actuator’s ability to create diverse, predictable motions. This approach highlights a significant shift in soft robotics design philosophy—moving from reliance on isotropic materials, where consistency in a material’s properties can hinder controlled deformation, to embracing anisotropic materials which allow for variation in property orientation.
Traditional approaches to fabricating FSPAs often resulted in cumbersome methods reliant on trial and intricate geometry with limited predictability. The shift towards automation in the design process, as proposed by Dr. Masato Tanaka and his colleagues, not only streamlines the creation of these actuators but also proposes a scientific method that could revolutionize the engineering of flexible materials. In their methodology, they established a nonlinear finite element model to explore how material fiber orientation could be optimized to achieve desired movement.
This optimization is crucial, as the arrangement of fibers directly influences how the actuator responds to pneumatic pressure. The research highlighted how integrating mathematical models of anisotropic reaction-diffusion systems into their design allowed them to produce complex, functional patterns that dictate movement. Consequently, this enables the crafting of actuators that can perform various missions with precise control over their deformation dynamics.
Fabrication Techniques: Bridging Theory and Practice
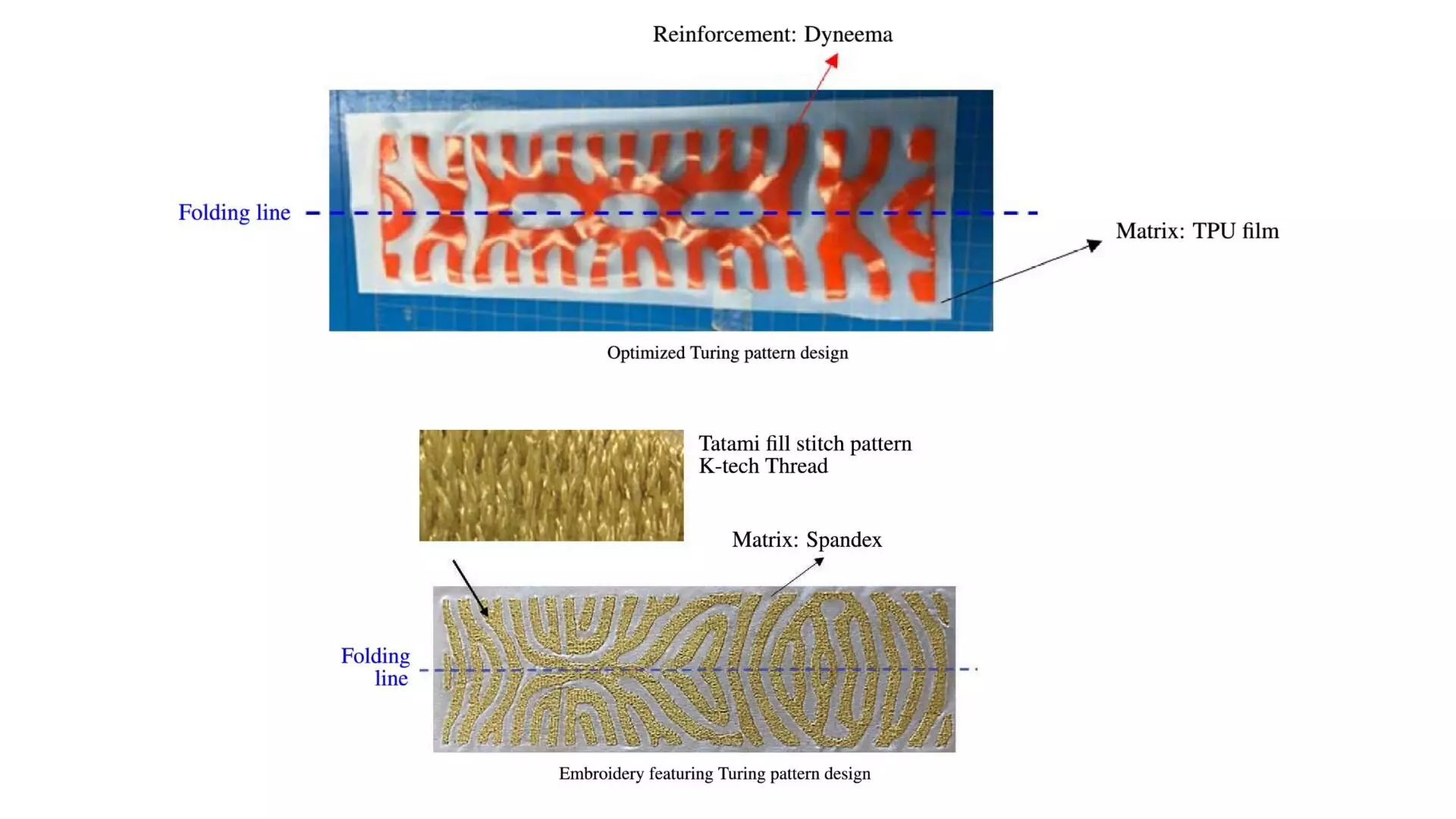
Transforming theoretical models into functional prototypes required innovative fabrication methods. The team investigated two primary techniques: heat bonding and embroidery. Heat bonding involves joining a rigid substrate—such as Dyneema—carefully designed to feature a Turing pattern to a softer flexible counterpart via a heat press. This results in a composite material that exhibits regionally distinct mechanical properties. On the other hand, the embroidery method inscribes the Turing pattern directly into the soft fabric, creating nuanced variations in stiffness that facilitate controlled movement.
Both techniques share the promise of cost-effective and scalable production, making them suitable candidates for future commercial applications. Through comparative analysis with conventional actuator designs, the researchers discovered that FSPAs featuring Turing patterns demonstrated superior performance, particularly in specific configurations like C-shaped movements, underscoring the efficacy of their innovative design process.
Looking ahead, the research team envisions a robust pathway for expanding the application of Turing patterns in soft robotic technologies. They aim to integrate cutting-edge materials, such as shape-memory alloys, with advanced polymer systems that respond to stimuli, promising to create actuators capable of even more sophisticated dynamics and functionalities.
Moreover, the incorporation of modern fabrication techniques like 3D printing and automated weaving into the production process presents exciting opportunities for mass production of large-scale actuators. Such innovations could ultimately lead to significant improvements in the efficiency and precision of soft robotic applications, paving the way for their broader use across various industries. The potential is vast and compelling, setting the stage for the next generation of responsive, adaptable robotics.
Leave a Reply